Care sunt considerentele importante atunci când se evaluează siguranța coboților?
Contributed By DigiKey's North American Editors
2024-04-03
Roboții colaborativi (coboți) sunt concepuți să lucreze cu oamenii și să susțină producția flexibilă în fabricile din Industria 4.0. În comparație cu roboții industriali tradiționali, coboții sunt mai simpli, mai ușor de instalat și nu necesită spații de lucru izolate în condiții de siguranță. Deoarece sunt concepuți pentru a lucra cu oamenii, coboții sunt construiți diferit față de alți roboți industriali, incluzând caracteristici precum sisteme de detectare a coliziunilor, feedback de forță, actuatoare elastice și servomotoare cu inerție redusă.
Deoarece coboții sunt diferiți din proiectare, s-au elaborat standarde de siguranță specifice pentru aceștia. Specificația tehnică a Organizației Internaționale de Standardizare (ISO/TS) 15066 prezintă cerințele de siguranță pentru coboții industriali și mediile de lucru ale acestora. Aceasta completează cerințele și orientările privind funcționarea coboților din ISO 10218-1 și ISO 10218-2.
Articolul de față trece în revistă cerințele ISO/TS 15066 și modul în care acestea se potrivesc cu ISO 10218-1 și 10218-2. Apoi, analizează complexitatea colaborării, inclusiv cum se definește un spațiu de lucru colaborativ. Examinează factorii legați de siguranța roboților, cum ar fi caracteristicile de siguranță încorporate în coboți și funcțiile de siguranță externe necesare, împreună cu exemple de dispozitive, cum ar fi senzorii de proximitate, barierele luminoase și covoarele de contact de siguranță. Se încheie cu o scurtă trecere în revistă a câtorva aplicații specifice considerentelor privind siguranța coboților.
Există mai multe standarde de siguranță esențiale pentru roboții industriali și coboți. ISO/TS 15066 detaliază cerințele de siguranță pentru sistemele de coboți industriali și mediul de lucru, și a fost redactat pentru a dezvolta și completa cerințele limitate din standardele anterioare, cum ar fi seria ISO 10218. ISO 10218-1 pune accentul asupra roboților generali și a dispozitivelor robotice, în timp ce ISO 10218-2 se concentrează asupra sistemelor și integrării roboților. American National Standards Institute/Robotics Industry Association (ANSI/RIA) R15.06 este o adoptare națională a ISO 10218-1 și ISO 10218-2.
Complexitatea colaborării
Înainte de a intra în detaliile privind siguranța coboților, este util să definim colaborarea. Colaborarea în domeniul roboticii este complexă și include trei factori:
- Un cobot este un „robot proiectat pentru interacțiunea directă cu un om într-un spațiu de lucru colaborativ definit”, conform ANSI/RIA R15.06.
- O operațiune de colaborare este o „stare în care un sistem robotizat proiectat în mod intenționat și un operator lucrează într-un spațiu de lucru colaborativ”, conform ISO/TS 15066.
- În cele din urmă, un spațiu de lucru colaborativ este „spațiul de lucru din cadrul spațiului protejat în care robotul și un om pot efectua sarcini simultan în timpul operațiunii de producție”, conform cu ANSI/RIA R15.06.
Totul se reduce la definiția spațiului de lucru colaborativ „în cadrul spațiului protejat”. Spațiul protejat include un strat de protecție pe lângă funcțiile de siguranță standard incluse în cobot.
Caracteristicile de protecție comune integrate în coboți includ sisteme de detectare a contactului bazate pe măsurători ale cuplului la fiecare articulație, care monitorizează impactul neașteptat, obstacolele sau forțele sau cuplul excesiv. De asemenea, ar trebui să existe sisteme de frânare automată și de eliberare manuală a frânelor pentru deplasarea brațului fără energie electrică.
Contactul neașteptat al cobotului cu o persoană reprezintă un aspect important. Standardele prevăd că trebuie prevenit contactul cu orice parte a capului unei persoane. În plus, standardul împarte corpul în 29 de zone specifice și detaliază limitările pentru două tipuri de contact:
- Contactul tranzitoriu este un eveniment dinamic, în mișcare, în care cobotul lovește o persoană. Limitările se definesc în funcție de locație, inerție și viteza relativă.
- Contactul cvasi-static are loc atunci când o parte a corpului este prinsă între cobot și o suprafață. Limitările se definesc în funcție de presiunea și forța asociate efectelor de strivire și de strângere.
Specificația oferă îndrumări, nu limite absolute, pe baza considerentelor aplicațiilor. În plus, se precizează că orientările sunt informative și reflectă cele mai bune practici actuale, deoarece colaborarea dintre oameni și roboți este un domeniu nou, iar cercetările sunt în curs de desfășurare.
Continuumul colaborării
Nu există o singură aplicație de colaborare. Oamenii și coboții pot interacționa și colabora într-o varietate de moduri. Aplicațiile colaborative variază de la coexistență, în care un robot aflat sub tensiune se oprește atunci când o persoană intră în spațiul de lucru colaborativ, până la o activitate interactivă în care persoana atinge cobotul în timpul funcționării (Figura 1).
 Figura 1: Colaborarea dintre oameni și roboți include o gamă largă de niveluri posibile de interacțiune. (Sursa imaginii: SICK)
Figura 1: Colaborarea dintre oameni și roboți include o gamă largă de niveluri posibile de interacțiune. (Sursa imaginii: SICK)
Este necesar să se realizeze o evaluare a riscurilor pentru a identifica nevoile de siguranță ale aplicațiilor individuale de colaborare. Aceasta include identificarea, evaluarea și reducerea pericolelor și a riscurilor asociate cu aplicația. ISO 10218 include o listă de caracteristici de siguranță care pot fi adecvate în diverse circumstanțe, dar nu conține cerințe definitive. ISO/TS 15066 aduce detalii suplimentare în ceea ce privește evaluarea riscurilor legate de coboți. În fiecare caz, scopul evaluării riscurilor este de a identifica dispozitivele și sistemele de siguranță externe necesare pentru a garanta implementarea în siguranță a aplicațiilor de colaborare.
Pentru o aprofundare a evaluării riscurilor și a roboților, consultați articolul „Integrarea sigură și eficientă a AMR-urilor în operațiunile din Industria 4.0 pentru beneficii maxime”.
Protecție și eficiență
În timp ce coboții sunt concepuți pentru a funcționa în siguranță, straturile de protecție suplimentare pot îmbunătăți eficiența aplicațiilor colaborative. Fără o siguranță suplimentară, atunci când o persoană intră în spațiul de lucru colaborativ, ISO/TS 15066 impune o viteză maximă de 0,25 de metri pe secundă (m/s) pe fiecare axă. Pentru majoritatea coboților, această viteză este foarte redusă.
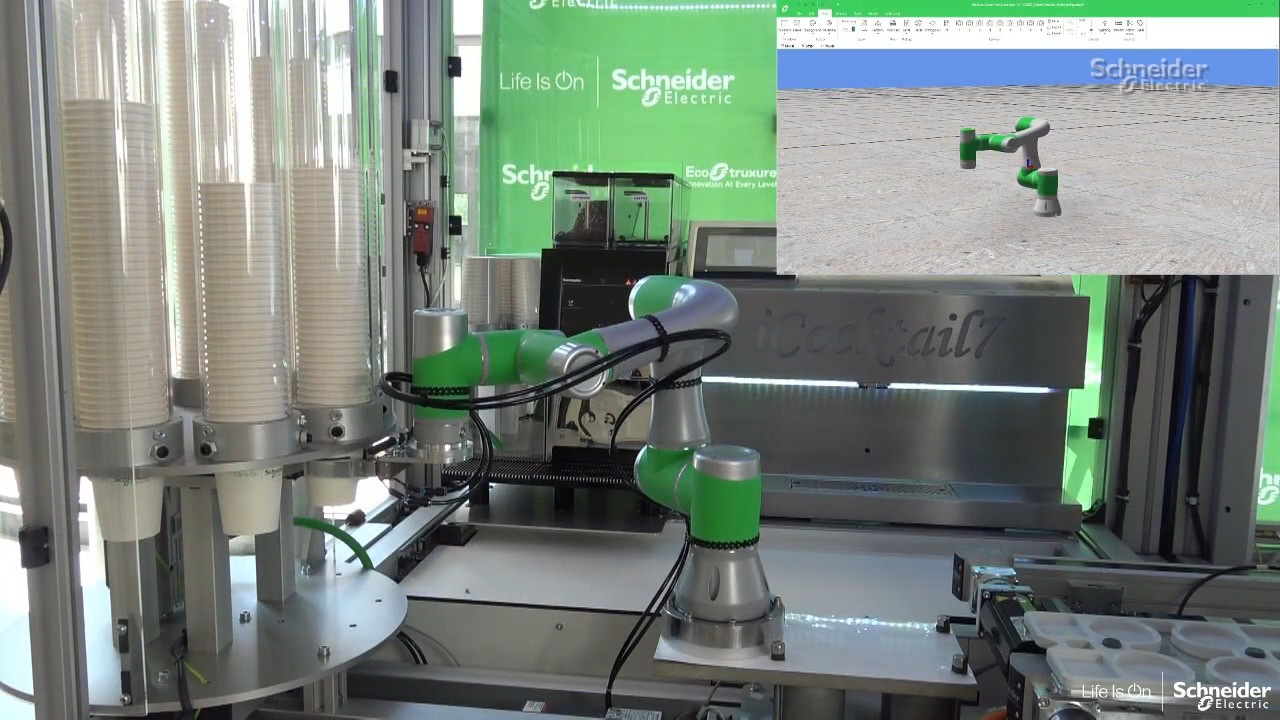
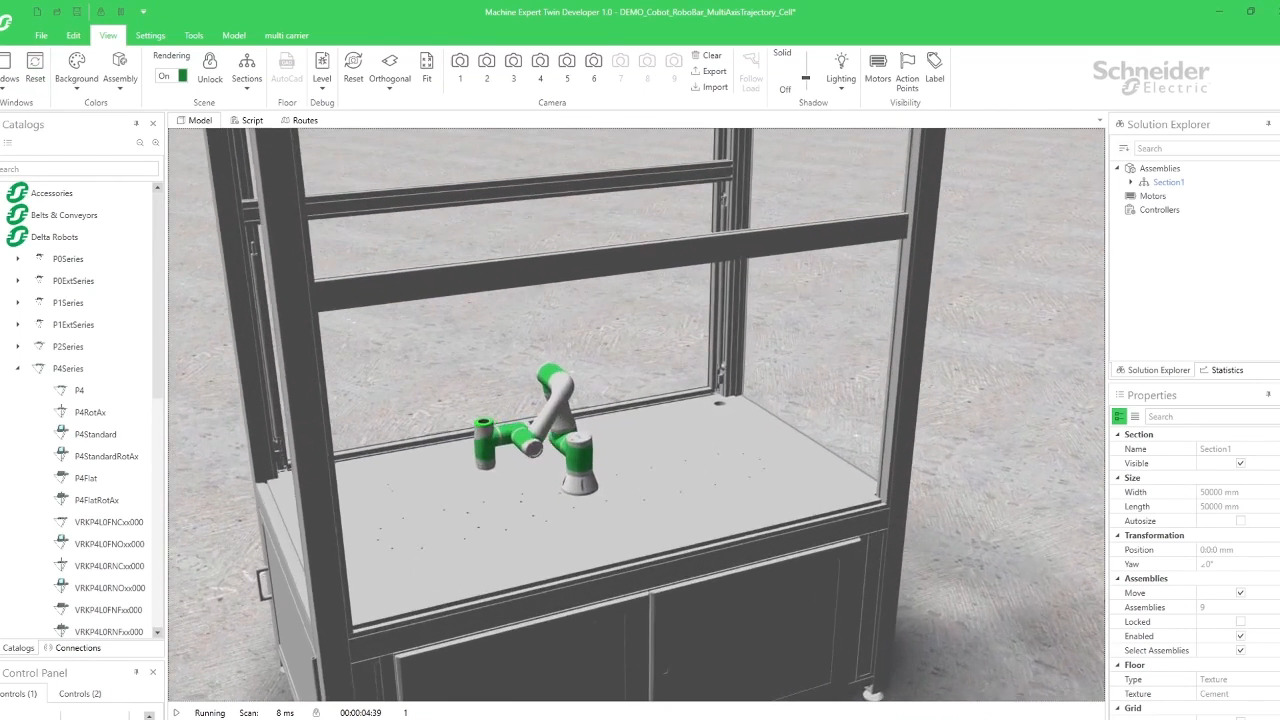
De exemplu, cobotul Lexium LXMRL12S0000 de la Schneider Electric are o sarcină utilă maximă de 12 kilograme (kg), o rază de operare (interval de lucru) de 1327 milimetri (mm), o precizie de poziționare de ±0,03 mm și o viteză maximă a capătului cu unealtă de 3 metri pe secundă (m/s), de 12 ori mai rapidă decât viteza maximă permisă de ISO/ 15066 atunci când o persoană se află în spațiul de lucru colaborativ (Figura 2).
 Figura 2: Acest cobot se poate deplasa de 12 ori mai rapid decât maximul permis de ISO/TS 15066 atunci când o persoană se află în spațiul de lucru colaborativ. (Sursa imaginii: Schneider Electric)
Figura 2: Acest cobot se poate deplasa de 12 ori mai rapid decât maximul permis de ISO/TS 15066 atunci când o persoană se află în spațiul de lucru colaborativ. (Sursa imaginii: Schneider Electric)
În multe aplicații, cobotul poate funcționa singur pentru perioade lungi de timp. Astfel, detectarea prezenței sau absenței persoanelor în spațiul de lucru colaborativ poate permite o operare mult mai rapidă și eficiență crescută atunci când nu este prezentă nicio persoană. Dispozitivele obișnuite pentru detectarea prezenței persoanelor includ scanerele de siguranță, barierele luminoase și covoarele de contact de siguranță. Fiecare tehnologie oferă un set diferit de beneficii și sunt adesea utilizate în combinație.
Scanere de siguranță
Scanerele de siguranță monitorizează o zonă desemnată pentru a detecta prezența persoanelor. Acestea pot determina cât de departe se află o persoană și pot implementa diverse zone de avertizare, pe lângă zona de siguranță activă.
Modelul OS32C-SP1-4M de la Omron este un bun exemplu de scaner de siguranță cu laser, conceput pentru utilizarea cu coboții. Acesta are o rază de siguranță de până la 4 metri (m) și poate accepta mai multe zone de avertizare de până la 15 m. Include 70 de seturi standard de combinații de zone de siguranță și zone de avertizare pentru a susține spațiile de lucru de colaborare complexe. În plus, rezoluția minimă a obiectelor poate fi setată la 30, 40, 50 sau 70 mm, iar timpul de răspuns poate varia de la 80 de milisecunde (ms) până la 680 ms, ceea ce crește și mai mult flexibilitatea aplicațiilor (Figura 3).
 Figura 3: Acest scaner de siguranță are o rază de siguranță de până la 4 m și poate accepta mai multe zone de avertizare de până la 15 m. (Sursa imaginii: DigiKey)
Figura 3: Acest scaner de siguranță are o rază de siguranță de până la 4 m și poate accepta mai multe zone de avertizare de până la 15 m. (Sursa imaginii: DigiKey)
Barierele luminoase
Barierele luminoase pot măsura prezența persoanelor și pot fi concepute pentru a detecta obiecte de diferite dimensiuni, cum ar fi degetele sau mâinile. Spre deosebire de scanerele de siguranță, barierele luminoase nu măsoară distanța. Acestea trimit o serie de fascicule de lumină între rețelele liniare de emițători și receptori și pot detecta când un obiect întrerupe unul sau mai multe fascicule.
În ceea ce privește evaluările de siguranță, există două clasificări principale ale barierelor luminoase: tipul 2 și tipul 4. Acestea au o înfățișare exterioară similară, dar sunt concepute pentru a oferi niveluri diferite de siguranță. Tipul 4 monitorizează spațiul protejat care definește un spațiu de lucru colaborativ. Barierele luminoase de tip 2 sunt concepute pentru aplicații cu risc mai scăzut.
Barierele luminoase protejează perimetrele și sunt disponibile cu mai multe niveluri de rezoluție, cum ar fi 14 milimetri (mm) pentru detectarea degetelor și 24 mm pentru detectarea mâinilor. Modelul SLC4P24-160P44 de la Banner Engineering este un kit de barieră luminoasă de tip 4 cu o matrice de emițători și receptori și are o rezoluție de 24 mm pentru a proteja oamenii și mașinile, cum ar fi coboții (Figura 4). Emițătoarele au un rând de diode emițătoare de lumină infraroșie modulate sincronizate. Receptoarele au un rând corespunzător de fotodetectoare sincronizate. Emițătoarele au o rază de acțiune de 2 metri, iar aceste bariere luminoase pot fi instalate în lungimi cuprinse între 160 și 320 mm, în trepte de 80 mm.
 Figura 4: Această barieră luminoasă de tip 4 are o rezoluție de 24 mm. (Sursa imaginii: Banner Engineering)
Figura 4: Această barieră luminoasă de tip 4 are o rezoluție de 24 mm. (Sursa imaginii: Banner Engineering)
Scanerele laser de siguranță și barierele luminoase oferă mijloace fără contact pentru a spori siguranța spațiilor de lucru colaborative. Cu toate acestea, ele nu pot fi utilizate cu ușurință în medii dificile din perspectiva opticii, cum ar fi zonele cu suprafețe foarte reflectorizante care pot trimite interferențe luminoase nedorite, și pot fi declanșate din cauza scurgerilor de ulei sau de unsoare, a prafului sau a umidității excesive.
Unii dintre acești senzori optici includ reglaje de sensibilitate care pot ajuta la atenuarea anumitor tipuri de interferențe. În plus, aceste ajustări de sensibilitate pot crește timpii de răspuns și alte compromisuri legate de performanță. O altă soluție este utilizarea unui covor de contact de siguranță împreună cu dispozitivele de detecție optică.
Covoare de contact de siguranță
Covoarele de contact de siguranță au două plăci conductoare separate de un strat izolator rasterizat și pot fi utilizate singure sau în combinație cu alte tipuri de senzori. Când o persoană calcă pe covor, placa conductoare superioară este apăsată și intră în contact cu placa inferioară, declanșând un semnal de alertă (Figura 5). Exteriorul covoarelor este realizat dintr-un material poliuretanic care este antiderapant și impermeabil la apă, murdărie și ulei. Modelul de covoare SENTIR 1602-5533 de la ASO Safety Solutions poate conecta până la 10 covoare în serie la o singură unitate de monitorizare pentru o acoperire maximă de 10 m2.
 Figura 5: Atunci când o persoană calcă pe covorul de siguranță, straturile conductoare superioare și inferioare ale acestuia intră în contact, declanșând un semnal de alertă. (Sursa imaginii: ASO Safety Solutions)
Figura 5: Atunci când o persoană calcă pe covorul de siguranță, straturile conductoare superioare și inferioare ale acestuia intră în contact, declanșând un semnal de alertă. (Sursa imaginii: ASO Safety Solutions)
Siguranța este în detalii
Nu există o singură formulă care să garanteze siguranța. Fiecare aplicație de colaborare este diferită și trebuie tratată în funcție de caracteristicile și nevoile sale unice. Un factor cheie este: unde se situează aplicația pe continuumul colaborării (consultați Figura 1)? Cu cât interacțiunea dintre cobot și oameni este mai strânsă, cu atât este mai multă nevoie de măsuri de protecție.
Trebuie luate în considerare mai multe detalii. Printre acestea se numără:
- Fiecare locație trebuie să fie supusă unei evaluări detaliate a riscurilor pentru a vedea dacă cobotul a fost mutat de la o stație de lucru la alta. Chiar dacă aceștia par a fi identici, mici variații pot face diferența în materie de siguranță.
- Dacă în spațiul de lucru colaborativ se află și alte mașini, este necesar ca acestea să fie conectate la sistemul de oprire sau la încetinirea de siguranță pentru cobot?
- Acest articol s-a concentrat pe hardware-ul de siguranță, dar pentru sistemele în rețea, care sunt din ce în ce mai frecvente, securitatea cibernetică este un aspect important pentru a preveni interferențele cu funcționarea coboților sau cu sistemele de siguranță.
Concluzie
Siguranța coboților este complexă. Aceasta începe cu definirea spațiului de lucru colaborativ în cadrul spațiului protejat și necesită o evaluare a riscurilor operațiunii de colaborare. Standarde precum ISO/TS 15066 și seria ISO 10218 sunt importante și oferă recomandări și orientări. Coboții includ caracteristici de siguranță de bază, cum ar fi sistemele de detectare a coliziunilor, feedback-ul forței, actuatoare elastice și servomotoare cu inerție redusă. În funcție de specificul aplicației de colaborare, pot fi necesare dispozitive de siguranță suplimentare, cum ar fi senzori de proximitate, bariere luminoase și covoare de contact de siguranță.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.