Cum se implementează rapid modulele GNSS de poziționare cu constelații multiple
Contributed By DigiKey's North American Editors
2021-09-09
Utilizarea funcțiilor bazate pe poziționare cu ajutorul receptoarelor sistemului global de navigație prin satelit (GNSS) cu constelații multiple pentru Galileo din Europa, Global Positioning System (GPS) din SUA, GLONASS din Rusia, sistemul de navigație prin satelit BeiDou din China și QZSS din Japonia este în creștere într-o gamă largă de aplicații, inclusiv robotică, vehicule autonome, automatizare industrială, logistică și urmărirea resurselor, drone și echipamente agricole și echipamente de construcții de mare capacitate. Beneficiile utilizării receptoarelor GNSS cu constelații multiple includ: o mai bună disponibilitate a semnalelor de poziție, navigație și sincronizare (PNT), acuratețe și integritate sporite și aplicații mai solide.
Dar dezvoltarea receptoarelor cu constelații multiple este o activitate complexă și care durează mult timp, ce include: optimizarea antenei în banda L; proiectarea circuitelor front-end de radiofrecvență (RF); integrarea algoritmilor de procesare a semnalelor în banda de bază pentru a achiziționa, urmări și aplica corecții pe diferite semnale PNT; codificarea software-ului de procesare al aplicației pentru a extrage datele PNT din fiecare canal al benzii de bază și utilizarea informațiilor pentru implementarea funcțiilor sistemului. De asemenea, proiectanții trebuie să aleagă o antenă adecvată și să o amplaseze corect.
Ca alternativă, proiectanții pot alege module GNSS și medii de dezvoltare preproiectate pentru a integra rapid și eficient funcția de poziționare într-un sistem. Aceste module GNSS includ front-end-ul RF, procesarea benzii de bază și firmware-ul încorporat pentru accelerarea dezvoltării software-ului de procesare al aplicațiilor. Unele module GNSS includ și antenele.
Acest articol trece în revistă elementele de bază ale GNSS, PNT și funcționarea receptoarelor GNSS cu constelații multiple. În continuare, se analizează avantajele și dezavantajele integrării antenelor în modulele GNSS, apoi se prezintă mai multe module GNSS – cu și fără antene integrate – precum și plăcile de evaluare asociate de la STMicroelectronics, Septentrio și Würth Elektronik, pe care proiectanții le pot aplica pentru dezvoltarea eficientă și rentabilă a unor aplicații precise și robuste bazate pe poziționare.
Ce sunt GNSS și PNT?
GNSS și PNT sunt concepte strâns legate între ele. Sateliții GNSS sunt cea mai comună sursă de semnale PNT. Sateliții GNSS sunt, în esență, ceasuri sincronizate de mare precizie, care transmit în mod constant informații PNT. Un modul GNSS primește semnale PNT de la un anumit satelit și își calculează distanța față de acesta. Atunci când receptorul cunoaște distanța până la cel puțin patru sateliți, acesta își poate estima propria poziție. Cu toate acestea, acuratețea estimării poziției este afectată de o varietate de surse de eroare, printre care:
- Abaterea ceasului din circuitele de cronometrare ale sateliților GNSS
- Inexactități în predicția poziției orbitale exacte a sateliților GNSS
- Abaterea generală a performanțelor echipamentului general al satelitului în raport cu alți sateliți, cunoscută și sub numele de eroare sistematică a satelitului
- Distorsiunile și întârzierile în transmiterea semnalului la trecerea acestuia prin ionosferă și troposferă.
- Reflecția multipath și performanță variabilă și abatere în receptor
Proiectanții au la dispoziție diverse tehnici pentru a corecta erorile GNSS din satelit și cele atmosferice.
Îmbunătățirea performanțelor GNSS
Cel mai bun mod de a minimiza impactul erorilor care provin din receptorul GNSS este utilizarea receptorului cu cele mai bune performanțe, adecvat pentru constrângerile de cost și dimensiune ale unei anumite aplicații. Dar nici receptoarele de înaltă performanță nu sunt perfecte; este foarte probabil ca performanța lor să poată fi îmbunătățită. Este important ca aceste metode de corecție să fie înțelese, deoarece oferă performanțe diferite, iar unele module GNSS nu sunt capabile să le implementeze pe toate.
Stațiile de referință terestre sunt utilizate pentru mai multe metode de corecție GNSS (Figura 1). Cele mai cunoscute metode de utilizare a stațiilor de referință terestre pentru a furniza corecții GNSS la receptoare sunt RTK (Real-Time Kinematic - Metoda cinematică în timp real) și PPP (Precise Point Positioning - Poziționare punctuală precisă). Mai recent, au devenit disponibile și metode hibride RTK-PPP.
 Figura 1: un receptor utilizator GNSS poate obține informații despre erorile legate de atmosferă, ceas și orbită de la o rețea de referință pentru a îmbunătăți precizia poziționării. (Sursa imaginii: Septentrio)
Figura 1: un receptor utilizator GNSS poate obține informații despre erorile legate de atmosferă, ceas și orbită de la o rețea de referință pentru a îmbunătăți precizia poziționării. (Sursa imaginii: Septentrio)
RTK se bazează pe o singură stație de bază sau pe o rețea locală de referință pentru datele de corecție care pot elimina majoritatea erorilor GNSS. RTK presupune că între stația de bază și receptor există o distanță mică – maxim 40 de kilometri (km) sau 25 de mile – astfel încât acestea să aibă aceleași erori. Metoda cinematică cu post-procesare sau PPK este o variantă a RTK și este utilizată pe scară largă în topografie și cartografie, pentru a obține date de poziționare de înaltă precizie sau o precizie la nivel de centimetru.
Numai erorile orbitei și ale ceasului satelitului sunt utilizate pentru a efectua corecțiile PPP. Aceste erori specifice sateliților sunt independente de locația utilizatorului, ceea ce limitează numărul de stații de referință necesare. Cu toate acestea, PPP nu ia în calcul erorile legate de atmosferă și, prin urmare, are o precizie mai mică decât RTK. În plus, corecțiile PPP pot avea timpi de inițializare de aproximativ 20 de minute. Timpul mai lung de inițializare și precizia mai mică fac ca PPP să fie nepractică pentru multe aplicații.
Aplicațiile care au nevoie de o precizie apropiată de RTK și de timpi de inițializare rapizi utilizează adesea cel mai nou serviciu de corecție GNSS, RTK-PPP (denumit uneori reprezentare în mulțimea stărilor (SSR)). Acesta utilizează o rețea de referință cu stații distanțate la aproximativ 100 km (65 mile) una de alta, care colectează date GNSS și calculează o combinație de corecții pentru satelit și atmosferă. Rețeaua de referință utilizează rețelele de internet, de satelit sau de telefonie mobilă pentru a trimite datele de corecție către abonați. Receptoarele GNSS care utilizează RTK-PPP pot avea precizii la nivel de sub-decimetru. Alegerea de a utiliza metodele de corecție RTK, PPP și RTK-PPP implică o serie de compromisuri de proiectare pe care dezvoltatorii trebuie să le analizeze pentru a selecta soluția optimă pentru profilul specific al aplicației. (Figura 2).
 Figura 2: avantajele și dezavantajele celor trei metode de corecție GNSS obișnuite. (Sursa imaginii: Septentrio)
Figura 2: avantajele și dezavantajele celor trei metode de corecție GNSS obișnuite. (Sursa imaginii: Septentrio)
Sistemele de îmbunătățire a poziționării bazate pe sateliți (SBAS) încep să devină disponibile la nivel regional, înlocuind metodele de corecție RTK, PPP și RTK-PPP bazate pe stațiile terestre. SBAS utilizează în continuare stații terestre pentru a măsura erorile GNSS, dar stațiile sunt răspândite pe continente întregi. Erorile măsurate sunt procesate într-o locație centrală, unde corecțiile sunt calculate și transmise către sateliții geostaționari aflați deasupra zonei acoperite. Datele de corecție sunt transmise de sateliți ca o suprapunere sau o îmbunătățire a datelor GNSS originale.
Precizia GNSS depinde de disponibilitatea și de precizia măsurătorilor prin satelit și de corecțiile asociate. Receptoarele GNSS de înaltă performanță urmăresc semnalele GNSS pe mai multe frecvențe și utilizează constelații GNSS multiple și diverse metode de corecție pentru a oferi precizia și reziliența necesare. Redundanța rezultată permite o performanță stabilă, chiar dacă unele dintre măsurătorile și datele de la satelit sunt supuse interferențelor. Proiectanții pot alege dintr-o varietate de funcții de precizie și redundanță GNSS (Figura 3).
 Figura 3: gradele de precizie GNSS cu metodele de corecție corespunzătoare și aplicațiile selectate. (Sursa imaginii: Septentrio)
Figura 3: gradele de precizie GNSS cu metodele de corecție corespunzătoare și aplicațiile selectate. (Sursa imaginii: Septentrio)
Module GNSS: antene integrate vs. antene externe
Având în vedere complexitatea poziționării cu constelații multiple, există module disponibile de la diverși furnizori care contribuie la accelerarea timpului de lansare pe piață, la reducerea costurilor și la asigurarea performanței. Acestea fiind spuse, proiectanții trebuie să se gândească dacă vor utiliza o antenă internă sau una externă pentru modulul GNSS. Pentru aplicațiile în care timpul de lansare pe piață și costurile sunt prioritare, o antenă integrată poate fi preferabilă, deoarece implică mult mai puțină inginerie. Pentru aplicațiile care necesită certificare FCC sau CE, utilizarea unui modul cu antenă integrată poate accelera, de asemenea, procesul de aprobare. Cu toate acestea, dimensiunea soluției poate crește, iar flexibilitatea poate fi limitată în cazul soluțiilor cu antenă integrată.
Antenele externe oferă proiectanților o gamă mai largă de opțiuni de performanță și dispunere. Se poate alege o antenă mare de performanță ridicată sau o antenă mai mică și mai puțin performantă. În plus, amplasarea antenei este mai flexibilă în raport cu locația modulului GNSS, ceea ce sporește și mai mult flexibilitatea proiectării. De asemenea, flexibilitatea de amplasare permite antenelor externe să asigure o funcționare GNSS mai fiabilă. Cu toate acestea, amplasarea antenelor și rutarea conexiunilor poate fi un proces complex și care durează mult timp, ce necesită o expertiză specifică, iar acest lucru poate duce la creșterea costurilor și la încetinirea timpului de lansare pe piață.
Modul GNSS mic pentru proiecte cu spațiu limitat
Echipele de proiectare care au expertiza necesară în ceea ce privește amplasarea și rutarea antenelor pot utiliza Teseo-LIV3F de la STMicroelectronics, un modul GNSS cu constelații multiple (GPS/Galileo/GLONASS/BeiDou/QZSS) care utilizează o antenă externă (Figura 4). Modulul este disponibil într-un pachet LCC-18 care măsoară 9,7 mm x 10,1 mm și dispune de o precizie de poziționare cu eroare circulară probabilă (CEP) de 1,5 metri (m), cu un timp până la prima identificare a poziției (TTFF) pentru pornirea la rece și la cald de sub 32 de secunde (s) și, respectiv, sub 1,5 s (GPS, GLONASS). Acesta are un consum de energie în standby de 17 microwați (µW) și un consum de energie de urmărire de 75 de miliwați (mW).
 Figura 4: modulul GNSS Teseo-LIV3F include nucleul și subsistemele GNSS, plus toate elementele de conectivitate și de gestionare a energiei necesare, într-un pachet de 9,7 x 10,1 mm. Acesta necesită utilizarea unei antene externe. (Sursa imaginii, STMicroelectronics)
Figura 4: modulul GNSS Teseo-LIV3F include nucleul și subsistemele GNSS, plus toate elementele de conectivitate și de gestionare a energiei necesare, într-un pachet de 9,7 x 10,1 mm. Acesta necesită utilizarea unei antene externe. (Sursa imaginii, STMicroelectronics)
Oscilatorul cu cristal compensat cu temperatura (TCXO) de 26 megahertzi (MHz) integrat al dispozitivului Teseo-LIV3F ajută la obținerea unei precizii ridicate, iar oscilatorul dedicat de 32 kilohertzi (kHz) cu ceas în timp real (RTC) permite reducerea timpului până la prima identificare a poziției (TTFF). Funcțiile precum înregistrarea datelor, GNSS autonom asistat timp de șapte zile, capacitatea de reconfigurare a firmware-ului (FW), precum și actualizările FW, sunt activate de memoria flash încorporată de 16 megabiți (Mbit).
Printre aplicațiile potrivite pentru Teseo-LIV3F se numără asigurările, logistica, dronele, sistemele de taxare, sistemele antifurt, localizarea persoanelor și a animalelor de companie, urmărirea vehiculelor și apelurile de urgență.
Fiind o soluție precertificată, utilizarea modulului Teseo-LIV3F poate duce la reducerea timpului de lansare pe piață a aplicației finale. Aceasta are un interval de temperatură de funcționare de la -40 °C la +85 °C.
Pentru a experimenta cu modulul și a accelera dezvoltarea aplicațiilor, proiectanții pot utiliza placa de evaluare AEK-COM-GNSST31. Atunci când se utilizează împreună cu firmware-ul X-CUBE-GNSS1, pachetul de evaluare poate accepta funcționalitatea de achiziție, urmărire, navigare și transmitere de date fără memorie externă. În plus, acest EVB este proiectat pentru a fi utilizat cu un microcontroler SPC5 pentru dezvoltarea de aplicații pentru automobile.
Modul GNSS cu atenuarea interferențelor
Receptorul GNSS cu constelații multiple 410322 mosaic-X5 de la Septentrio este un modul de mică putere, montat pe suprafață, care măsoară 31 mm x 31 mm x 4 mm și care oferă proiectanților o serie de interfețe, inclusiv patru UART, Ethernet, USB, SDIO și două GPIO care pot fi programate de către utilizator.
Proiectat pentru utilizarea în robotică, sisteme autonome și alte aplicații de masă, mosaic-X5 are o rată de actualizare de 100 hertzi (Hz), o latență de sub 10 milisecunde (ms) și o precizie de poziționare RTK verticală și orizontală de 0,6 cm și, respectiv, 1 cm. Acesta poate urmări toate constelațiile GNSS, acceptând semnale actuale și viitoare, și este compatibil cu corecțiile PPP, SSR, RTK și SBAS. Valoarea TTFF a modulului este de sub 45 s la pornirea la rece și sub 20 s la pornirea la cald.
mosaic-X5 dispune de mai multe tehnologii brevetate de Septentrio, inclusiv AIM+, o tehnologie de atenuare integrată a interferențelor, care suprimă o varietate de interferențe, de la semnale simple continue în bandă îngustă la bruiaje complexe în bandă largă și în impulsuri.
Interfețele, comenzile și mesajele de date ale modulelor sunt complet documentate. Software-ul RxTools inclus permite configurarea și monitorizarea receptorului, precum și înregistrarea și analiza datelor.
Kitul de dezvoltare 410331P3161 mosaic-X5 de la Septentrio permite proiectanților să exploreze, să evalueze și să dezvolte prototipuri care să utilizeze la maximum capacitățile dispozitivului mosaic-X5 (Figura 5).
 Figura 5: proiectanții pot crea un prototip cu ajutorul kitului de dezvoltare 410331P3161 mosaic-X5, folosind o varietate de conexiuni, inclusiv Ethernet, porturi COM sau USB 2.0, sau folosind un card de memorie SD. (Sursa imaginii: Septentrio)
Figura 5: proiectanții pot crea un prototip cu ajutorul kitului de dezvoltare 410331P3161 mosaic-X5, folosind o varietate de conexiuni, inclusiv Ethernet, porturi COM sau USB 2.0, sau folosind un card de memorie SD. (Sursa imaginii: Septentrio)
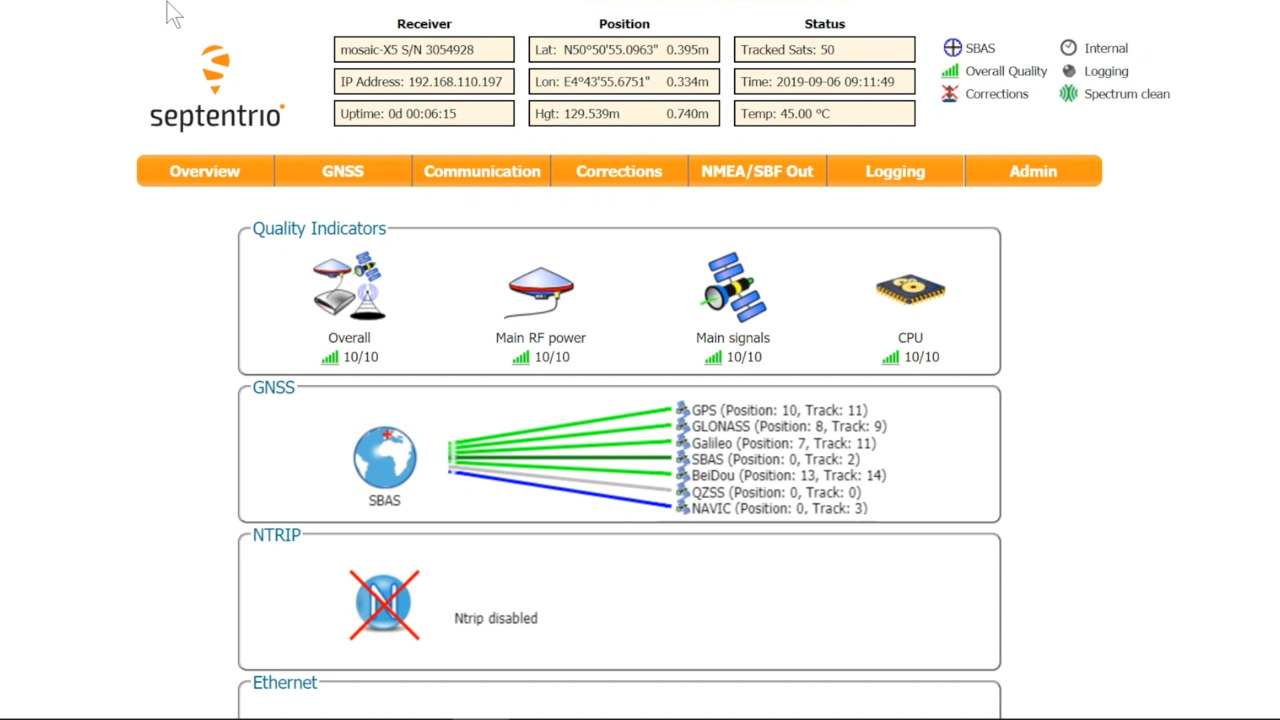
Kitul utilizează interfața de utilizare web intuitivă a dispozitivului mosaic-X5 pentru operare și monitorizare ușoară, ce permite proiectanților să controleze modulul receptorului de pe orice dispozitiv mobil sau computer. Interfața web utilizează indicatori de calitate ușor de citit pentru monitorizarea funcționării receptorului.
Proiectanții pot crea un prototip prin integrarea kitului de dezvoltare mosaic, folosind oricare dintre următoarele conexiuni: Ethernet, porturi COM, USB 2.0, card de memorie SD.
Modul GNSS cu antenă integrată
Pentru proiectanții de aplicații care pot beneficia de utilizarea unui modul GNSS cu o antenă integrată, Würth Elektronik oferă modulul 2614011037000 Erinome-I cu un sistem pe cip (SoC) de înaltă performanță (Figura 6). Modulul este compatibil cu constelațiile GNSS GPS, GLONASS, Galileo și BeiDou și este prevăzut cu o antenă integrată în partea superioară, care simplifică integrarea hardware și scurtează timpul de lansare pe piață. Modulul, incluzând antena integrată, măsoară 18 mm x 18 mm.
 Figura 6: 2614011037000 Erinome-I este un modul GNSS complet, cu un SoC GNSS de înaltă performanță și o antenă integrată. (Sursă imagine: Würth Elektronik)
Figura 6: 2614011037000 Erinome-I este un modul GNSS complet, cu un SoC GNSS de înaltă performanță și o antenă integrată. (Sursă imagine: Würth Elektronik)
De asemenea, modulul include TCXO, filtrul RF, amplificatorul de zgomot redus (LNA) și memoria flash în serie.
În plus, Würth oferă placa de evaluare (EVB) 2614019037001 pentru Erinome-I (Figura 7). EVB poate funcționa și ca un proiect de referință pentru integrarea modulului GNSS într-o aplicație. Un port USB poate fi utilizat pentru a conecta EVB la un PC. Un conector cu mai mulți pini oferă proiectanților acces la toți pinii modulului GNSS.
 Figura 7: placa de evaluare 2614019037001 pentru Erinome-I (în apropierea centrului plăcii, cu antena integrată vizibilă în centrul modulului) funcționează și ca proiect de referință. (Sursă imagine: Würth Elektronik)
Figura 7: placa de evaluare 2614019037001 pentru Erinome-I (în apropierea centrului plăcii, cu antena integrată vizibilă în centrul modulului) funcționează și ca proiect de referință. (Sursă imagine: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) este un instrument simplu de PC pentru interacționarea cu modulul GNSS Erinome-I folosind interfața UART. Acesta acceptă:
- Controlul funcționării EVB
- Comunicare bidirecțională cu modulul Erinome-I
- Evaluarea caracteristicilor și capacităților Erinome-I
- Familiarizarea cu protocoalele, propozițiile și comenzile Erinome-I
- Configurarea Erinome-I fără cunoașterea protocoalelor
- Analizarea propozițiilor și a comenzilor utilizate de Erinome-I
WENSS permite o evaluare ușoară a aplicațiilor de poziționare fără cunoștințe avansate. Dezvoltatorii experimentați pot utiliza WENSS și pentru configurații mai avansate.
Concluzie
O capacitate de poziționare precisă și de încredere se obține cel mai bine prin utilizarea mai multor constelații cu sprijinul tehnologiilor de corecție asociate. Acestea sunt sisteme complexe, dar proiectanții pot utiliza module GNSS, kituri de dezvoltare asociate și medii preproiectate pentru a compara rapid și eficient opțiunile și pentru a implementa caracteristici și servicii bazate pe poziție.
Lectură recomandată
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.