Cum se integrează etapele de putere GaN pentru sistemele eficiente de propulsie a motoarelor BLDC alimentate cu baterii
2023-02-22
Aplicațiile alimentate cu baterii, cum ar fi roboții colaborativi (coboți), bicicletele electrice, dronele industriale și uneltele electrice, necesită motoare electrice ușoare și puternice, cu factor de formă mic. Motoarele de curent continuu fără perii (BLDC) sunt o opțiune bună, însă componentele electronice ale driverului motorului sunt destul de complexe și implică multe considerente privind proiectarea. Proiectantul trebuie să regleze cu precizie cuplul, viteza și poziția, asigurând, în același timp, o precizie ridicată, cu vibrații, zgomot și radiații electromagnetice (EMR) minime. În plus, pentru a reduce greutatea, spațiul și costurile, trebuie evitate radiatoarele voluminoase și cablajele externe.
Așa cum se întâmplă adesea, provocarea pentru proiectanți devine una de echilibrare a cerințelor de proiectare cu presiunile legate de timp și buget, evitând, în același timp, erorile de dezvoltare costisitoare. O modalitate de a face acest lucru este de a profita de tehnologiile materialelor semiconductoare rapide și cu pierderi reduse, cum ar fi nitrura de galiu (GaN) pentru etapele de putere necesare pentru acționarea motoarelor BLDC.
Acest articol discută avantajele relative ale etapelor de putere pe bază de GaN și prezintă un dispozitiv eșantion de la EPC, implementat într-o topologie de tip jumătate de punte. Explică modul de utilizare a kiturilor de dezvoltare asociate pentru lansarea rapidă a unui proiect. În cadrul acestui proces, proiectanții vor învăța cum să măsoare parametrii unui motor BLDC și să îl opereze în modul de control fără senzori orientat pe câmp (FOC) cu un efort minim de programare, utilizând suita de dezvoltare motorBench Development Suite de la Microchip Technology.
Avantajele GaN
Pentru a controla în mod eficient un motor BLDC în aplicațiile cu baterii, dezvoltatorii au nevoie de o etapă de comandă eficientă și ușoară, cu un factor de formă mic, care să poată fi implementată cât mai aproape posibil de dispozitivul de acționare. De exemplu, în interiorul carcasei motorului.
Tranzistoarele bipolare cu poartă izolată (IGBT) sunt robuste și pot comuta o putere mare, de până la 100 de megawați (MW) la o frecvență maximă de 200 de kilohertzi (kHz), însă nu sunt potrivite pentru dispozitivele care trebuie să gestioneze încărcarea bateriilor la tensiuni de până la 80 de volți. Rezistența de contact ridicată, dioda cu mers liber și pierderile la comutare, precum și curentul de amortizare din timpul opririi, toate acestea se combină, având ca rezultat distorsionarea semnalului, generarea de căldură excesivă și emisiile de noxe.
Tranzistoarele cu efect de câmp de tip metal-oxid-semiconductor (MOSFET) realizează mai rapid comutarea și au pierderi la comutare și ohmice mai mici comparativ cu IGBT-urile, dar capacitatea lor de poartă necesită un driver de poartă puternic pentru a funcționa la frecvențe de comutare ridicate. Capacitatea de a funcționa la frecvențe înalte este importantă, deoarece înseamnă că proiectanții pot utiliza componente electronice mai mici pentru a reduce spațiul total necesar.
În ceea ce privește tranzistoarele GaN cu mobilitate ridicată a electronilor (HEMT), mobilitatea ridicată a frecvenței purtătoare le permite să se acumuleze și să întrerupă joncțiunile semiconductoarelor extrem de rapid și cu pierderi reduse. Un driver GaN integrat, cum ar fi EPC23102ENGRT de la EPC, are pierderi de comutare excepțional de scăzute și frecvențe de comutare ridicate, permițând proiectarea de dispozitive compacte în cele mai înguste spații. Cipul monolitic conține o interfață logică de intrare cu schimbătoare de nivel, încărcare bootstrap și circuite ale driverelor de poartă care controlează FET-urile de ieșire GaN într-o topologie de tip jumătate de punte (Figura 1). Capsula cipului este optimizată pentru o disipare ridicată a căldurii și o inductanță parazită redusă.
") Figura 1: EPC23102 conține logică de control, schimbătoare de nivel, drivere de poartă și FET-uri de ieșire GaN într-o topologie de tip jumătate de punte (stânga). Capsula cipului (dreapta) este optimizată pentru o disipare ridicată a căldurii și o inductanță parazită redusă. (Sursă imagine: EPC)
Figura 1: EPC23102 conține logică de control, schimbătoare de nivel, drivere de poartă și FET-uri de ieșire GaN într-o topologie de tip jumătate de punte (stânga). Capsula cipului (dreapta) este optimizată pentru o disipare ridicată a căldurii și o inductanță parazită redusă. (Sursă imagine: EPC)
Mai puțină căldură reziduală și EMR mai reduse
Tranzistoarele de ieșire EPC23102 au o rezistență drenă-sursă în stare pornită [RDS(activat)] tipică de 5,2 miliohmi (mΩ) (la 25°C). Acestea acceptă tensiuni de până la 100 de volți și curenți de până la un maxim de 35 de amperi (A). În plus, structura laterală a dispozitivului GaN și absența unei diode de corp intrinseci asigură o sarcină de intrare cu poartă (QG) și o sarcină de recuperare inversă (QRR) excepțional de reduse.
În comparație cu un dispozitiv MOSFET cu un RDS(activ) similar, driverul GaN obține pierderi la comutare de până la cinci ori mai mici. Acest lucru permite ca un invertor pe bază de GaN să funcționeze la frecvențe de modulare a lățimii impulsurilor (PWM) relativ ridicate - până la 3 megahertzi (MHz) - și cu un timp mort mai scurt [sub 50 de nanosecunde (ns)].
Vitezele mari de comutare (dV/dt) și coeficientul scăzut de temperatură al semiconductoarelor GaN într-un design al capsulei cu inductanță parazită redusă minimizează distorsiunea semnalului și, prin urmare, minimizează EMR și pierderile la comutare. Acest lucru reduce necesitatea strategiilor de filtrare, în timp ce condensatorii și inductorii mai mici și cu costuri reduse economisesc spațiu pe placă.
Împreună cu rezistența de contact scăzută RDS(activ), celelalte avantaje ale dispozitivului GaN, cum ar fi conductivitatea termică ridicată a substratului GaN și suprafața mare de contact termic a capsulei componentei, se combină pentru a permite etapelor de putere GaN să comute curenți de până la 15 amperi (A) fără un radiator (Figura 2).
") Figura 2: Creșterea temperaturii versus curentul de fază pentru o etapă de putere GaN cu o temperatură ambiantă de 25,5°C și la diferite frecvențe PWM. (Sursă imagine: EPC)
Figura 2: Creșterea temperaturii versus curentul de fază pentru o etapă de putere GaN cu o temperatură ambiantă de 25,5°C și la diferite frecvențe PWM. (Sursă imagine: EPC)
EPC23102 dispune, de asemenea, de convertizoare de nivel robuste de la canalele din partea inferioară la cele din partea superioară, concepute pentru a funcționa în condiții de comutare ușoară și puternică - chiar și la tensiuni terminale negative mari - și pentru a evita declanșarea falsă provocată de fenomenele tranzitorii dV/dt rapide, inclusiv cele care provin din surse externe sau din faze adiacente. Circuitele interne integrează funcțiile logice și de încărcare și dezactivare bootstrap. Funcțiile de protecție previn pornirea nedorită la ieșirea FET atunci când tensiunile de alimentare sunt prea mici sau chiar nu funcționează.
Un set de evaluare a invertorului de motor gata de utilizare
Cea mai simplă și mai rapidă modalitate de a pune în funcțiune un motor BLDC trifazat cu tehnologie GaN este să utilizați kitul de evaluare a invertorului de motor EPC EPC9176KIT de la EPC. Acesta este alcătuit din placa de invertor de motor EPC9176 și o placă de controler DSP. De asemenea, este inclus un adaptor simplu de conectare a controlerului EPC9147E pentru controlul prin intermediul unui controler gazdă specific clientului. Conectorul de cuplare transportă următoarele semnale: 3 × PWM, 2 × codificator, 3 × Ufază, 3 × Ifază, Uc.c., Ic.c. și 2 × LED de stare.
Ca proiect de referință, placa de invertor de motor EPC9176 facilitează proiectarea internă a circuitelor, în timp ce placa de controler EPC9147A, atunci când este utilizată cu mediul de dezvoltare motorBench de la Microchip Technology, le permite utilizatorilor să înceapă să lucreze imediat, fără a fi nevoiți să piardă timpul cu codificarea sau programarea.
Invertorul de motor BLDC trifazat integrează trei drivere EPC23102 GaN de tip jumătate de punte GaN pentru a controla motoare c.a. sau c.c. și convertoare de putere c.c./c.c. Cu un RDS(activ) de maximum 6,6 mΩ, etapa de putere provoacă o pierdere de căldură redusă la curenți de sarcină de până la 28 A de vârf (Apk) sau 20 A rms (ARMS) în condiții de funcționare constantă la tensiuni de comutare de până la 100 de volți. Configurat pentru conversie c.c./c.c. multifazică, EPC23102 acceptă frecvențe de comutare PWM de până la 500 kHz și până la 250 kHz pentru aplicații pentru driverele motoarelor.
Placa de invertor de motor de 8,1 × 7,5 centimetri (cm) EPC9176 conține toate circuitele funcționale critice necesare pentru a suporta un invertor de motor complet, inclusiv condensatori de magistrală c.c., drivere de poartă, tensiuni auxiliare reglate, tensiune de fază, curent de fază și măsurare a temperaturii, împreună cu funcții de protecție și filtre opționale de armonici sau EMR pentru fiecare fază (Figura 3).
") Figura 3: Invertorul de motor EPC9176 dispune de condensatori de magistrală c.c., drivere de poartă, un regulator de tensiune, funcții de detectare a tensiunii, de protecție a curentului și a temperaturii și filtre EMR. (Sursă imagine: EPC)
Figura 3: Invertorul de motor EPC9176 dispune de condensatori de magistrală c.c., drivere de poartă, un regulator de tensiune, funcții de detectare a tensiunii, de protecție a curentului și a temperaturii și filtre EMR. (Sursă imagine: EPC)
Invertorul trifazat GaN funcționează la tensiuni de intrare cuprinse între 14 și 65 Vc.c. Comutarea se realizează fără supraîncărcare, rezultând un cuplu lin și un zgomot de funcționare minim. Placa este optimizată pentru o pantă de comutare de mare viteză tipică GaN sub 10 volți pe ns (V/ns) și, opțional, poate fi redusă pentru a opera un convertor c.c./c.c. În plus, pot fi conectați doi senzori de poziție a rotorului (senzori Hall) care funcționează la niveluri de tensiune diferite.
Cuplu fără vibrații și zgomot de funcționare redus
Un exemplu de implementare a unui motor BLDC trifazat demonstrează efectul parametrizării timpului mort asupra funcționării liniare a motorului și, prin urmare, asupra generării zgomotului. Se poate opta ca timpul de blocare la tranziția de comutare a FET-urilor de nivel înalt și de nivel scăzut ale unei topologii de tip jumătate de punte bazate pe FET-uri GaN să fie unul foarte mic, deoarece HEMT-urile GaN reacționează extrem de rapid și nu produc supraîncărcări parazite, așa cum se întâmplă în cazul MOSFET-urilor mai lente.
Figura 4 (stânga) prezintă un invertor GaN care funcționează la un timp mort tipic pentru MOSFET-uri de 500 ns la o frecvență PWM de 40 kHz. Ceea ce ar trebui să fie un curent de fază sinusoidală netedă prezintă o distorsiune extrem de mare, rezultatul fiind ondulațiile mari ale cuplului și zgomotul corespunzător. În Figura 4 (dreapta), timpul mort a fost redus la 50 ns, stabilindu-se un curent de fază sinusoidal pentru un motor cu funcționare lină și foarte puțin zgomot.
") Figura 4: Un timp mort de 500 ns la o frecvență PWM de 40 kHz (stânga), tipic pentru MOSFET-uri, provoacă o distorsiune ridicată a curentului de fază, rezultând în ondulații mari ale cuplului și niveluri ridicate de zgomot. Cu un timp mort de 50 ns (dreapta), se stabilește un curent de fază sinusoidal, astfel încât motorul se rotește lin și cu zgomot redus. (Sursă imagine: EPC)
Figura 4: Un timp mort de 500 ns la o frecvență PWM de 40 kHz (stânga), tipic pentru MOSFET-uri, provoacă o distorsiune ridicată a curentului de fază, rezultând în ondulații mari ale cuplului și niveluri ridicate de zgomot. Cu un timp mort de 50 ns (dreapta), se stabilește un curent de fază sinusoidal, astfel încât motorul se rotește lin și cu zgomot redus. (Sursă imagine: EPC)
O ondulație mai mică a curentului de fază înseamnă, de asemenea, pierderi mai mici de magnetizare în bobinele statorului, în timp ce o ondulație mai mică a tensiunii de fază permite o rezoluție mai mare, precum și un control mai precis al cuplului și al turației, în special pentru motoarele cu inductanță redusă utilizate în modelele mai mici.
În cazul aplicațiilor pentru driverele motoarelor care necesită o putere mai mare, sunt disponibile două plăci de invertor GaN: EPC9167HCKIT [1 kilowatt (kW)] și EPC9167KIT (500 wați). Ambele utilizează EPC2065 GaN FET, care are un RDS(activ) maxim de 3,6 mΩ și o tensiune maximă a dispozitivului de 80 de volți. În timp ce placa EPC9167 utilizează un singur FET pentru fiecare poziție de comutare, EPC9167HC are două FET-uri care lucrează în paralel, oferind un curent de ieșire maxim de 42 Apk (30 ARMS). EPC2065 GaN FET acceptă frecvențe de comutare PWM de până la 250 kHz în aplicații pentru controlul motoarelor și maximum 500 kHz în convertoare c.c./c.c.
O putere și mai mare, de până la 1,5 kW, este asigurată de placa de invertor din EPC9173KIT. Placa formează ramurile de jumătate de punte a două circuite integrate de comandă de poartă EPC23101ENGRT GaN care au un singur FET de putere de nivel înalt integrat. Această placă poate fi extinsă ca un convertor de coborâre, de amplificare, tip jumătate de punte, tip punte completă sau LLC. Aceasta livrează curenți de ieșire de până la 50 Apk (35 ARMS) și funcționează la frecvențe de comutare PWM de până la 250 kHz, cu răcire corespunzătoare.
Puneți în funcțiune etapa driverului în câteva minute
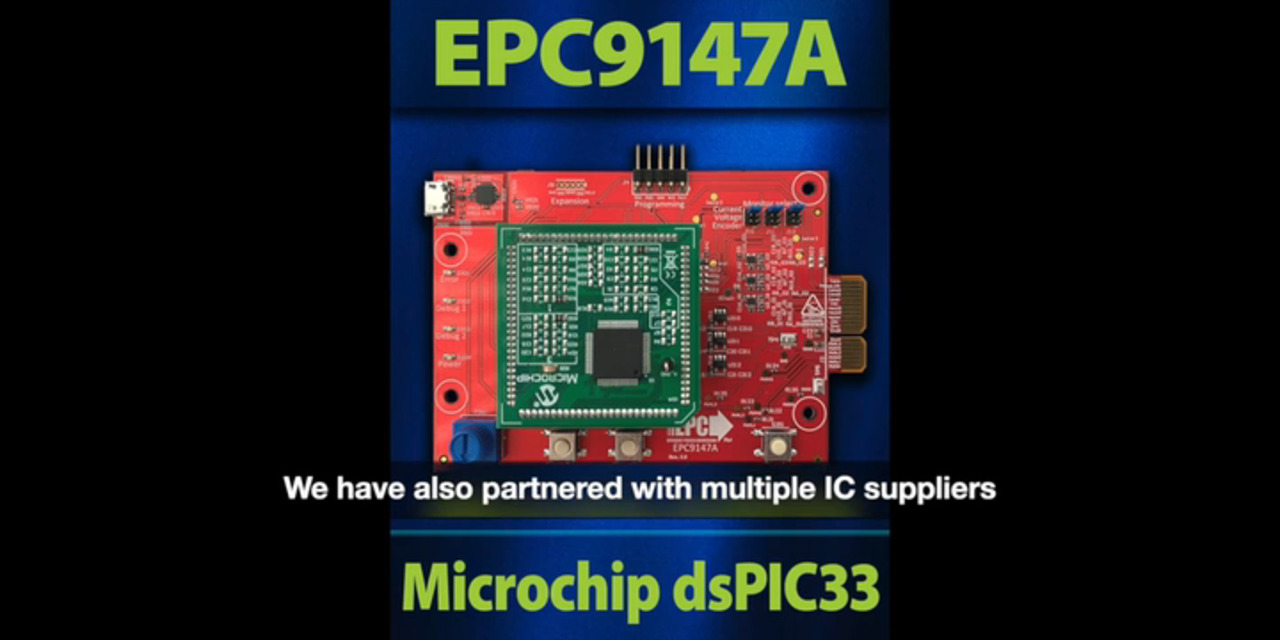
Cel mai rapid mod de a evalua placa de invertor GaN EPC9176 - fără a fi nevoie să codificați - este să utilizați placa de interfață a controlerului EPC9147A. Un modul plug-in (PIM) - MA330031-2 - conține DSP-ul dsPIC33EP256MC506-I-PT pe 16 biți de la Microchip Technology (Figura 5).
") Figura 5: Placa de interfață a controlerului universal EPC9147A poate găzdui diverse module plug-in, cum ar fi MA330031-2 PIM, care se bazează pe DSP-ul dsPIC33EP256 pe 16 biți. (Sursă imagine: EPC/Microchip Technology)
Figura 5: Placa de interfață a controlerului universal EPC9147A poate găzdui diverse module plug-in, cum ar fi MA330031-2 PIM, care se bazează pe DSP-ul dsPIC33EP256 pe 16 biți. (Sursă imagine: EPC/Microchip Technology)
Pentru a facilita operarea interfeței controlerului DSP, proiectanții pot utiliza motorBench Development Suite, la care trebuie să adauge:
- MPLAB X IDE_V5.45 și actualizarea recomandată
- Plugin-ul Code Configurator (compilare specifică DSP)
- Plugin-ul motorBench 2.35 (exemple de motoare)
Pentru această discuție, exemplul utilizează placa de invertor de motor EPC9146 GaN, deci:
- Începeți cu proiectul MCLV-2 sau EPC pentru EPC914xKIT numit „sample-mb-33ep256mc506-mclv2.X”
Utilizatorul poate selecta, pur și simplu, fișierul hexagonal de probă pentru placa de invertor de motor EPC9146 GaN și îl poate introduce în DSP dsPIC33EP256MC506 utilizând un adaptor de programare, cum ar fi PG164100 de la Microchip Technology pentru microcontrolere pe 16 biți. Motorul BLDC conectat (Teknic_M-3411P-LN-08D) este apoi controlabil manual prin intermediul comenzilor și funcționează în modul FOC fără senzori.
În cazul în care motorul nu funcționează în mod satisfăcător sau trebuie configurat pentru o stare de funcționare diferită, motorBench oferă, de asemenea, un fișier de probă configurabil care trebuie compilat înainte de a fi pornit. Un parametru elementar, dar important pentru driverele de motor GaN, așa cum s-a discutat mai sus, este un timp mort de 50 ns sau mai mic, care trebuie neapărat verificat înainte de compilarea fișierului hexagonal.
Parametrii personalizați pentru un motor BLDC
Pentru a obține configurații personalizate ale motoarelor BLDC pentru funcționarea FOC fără senzori utilizând motorBench IDE, utilizatorii pot măsura parametrii specifici ai motorului și pot introduce valorile relevante într-un fișier de configurare. Motorul MOT-I-81542-A de la ISL Products International, de exemplu, poate servi ca motor de testare. Acesta consumă o energie de aproximativ 361 de wați, funcționând la 24 de volți și la 6.100 de rotații pe minut (rpm).
Acești patru parametri ai motorului trebuie mai întâi să fie determinați:
- Rezistența ohmică: aceasta se măsoară între bornele bobinei statorului cu ajutorul unui multimetru
- Inductanța: se măsoară între bornele bobinei statorului cu ajutorul unui multimetru
- Perechi de poli: pentru a determina perechile de poli, proiectantul trebuie să scurtcircuiteze două faze, să o lase pe cea de-a treia deschisă, apoi să numere manual numărul de latch-uri la o turație a arborelui, după care să împartă rezultatul la doi
- Forța contraelectromotoare (BEMF): BEMF se măsoară între bornele bobinei statorului cu ajutorul unui osciloscop. Pentru a face acest lucru, proiectantul trebuie:
- Să fixeze sonda la două conductoare de fază, lăsându-l pe al treilea deschis
- Să rotească arborele motorului cu mâna și să înregistrez răspunsul tensiunii
- Să măsoare tensiunea de la vârf la vârf App și durata Tjumătate a celei mai mari semiunde sinusoidale (Figura 6).
") Figura 6: BEMF se determină prin măsurarea tensiunii de la vârf la vârf App și a duratei Tjumătate a celei mai mari semiunde sinusoidale. (Sursă imagine: EPC)
Figura 6: BEMF se determină prin măsurarea tensiunii de la vârf la vârf App și a duratei Tjumătate a celei mai mari semiunde sinusoidale. (Sursă imagine: EPC)
Referindu-se la exemplul de proiect de mai sus, Microchip a determinat următorii parametri pentru motorul Teknic M-3411P-LN-08D (8,4 ARMS, opt poli, cuplu = 1 Newton-metru (Nm) și o putere nominală de 244 wați):
- App = 15.836 Vpp
- Tjumătate = 13,92 ms
- Perechi de poli: pp = 4
- Microchip a calculat apoi constanta BEMF (pentru 1000 rpm = 1 krpm), folosind Ecuația 1:
") Ecuația 1
Ecuația 1
 pentru acest exemplu de motor
pentru acest exemplu de motor
(pentru motorBench a fost utilizată o valoare de 10,2)
- RL-L = 800 mΩ rezistență în cazul tensiunii între faze, minus 100 mΩ din cauza cablurilor de măsurare LCR
- Ld = Lq = 1 mH utilizat în acest exemplu, în ciuda faptului că se măsoară 932 microhenri (µH)
Parametrii determinați sunt introduși în motorBench submeniul Configurare/Motor PMSM. Pentru a face acest lucru, proiectanții pot utiliza, pur și simplu, fișierul de configurare XML al unui tip de motor similar. Alternativ, parametrii pot fi introduși într-un fișier de configurare nou creat (gol) care poate fi importat prin intermediul butonului „Import motor”.
Concluzie
Circuitele integrate de comandă a motorului GaN ating performanțe de înaltă eficiență în driverele motoarelor BLDC alimentate cu baterii, cu un factor de formă mic și o greutate redusă. Integrate în carcasa motorului, acestea sunt bine protejate, simplifică proiectarea și instalarea dispozitivului și reduc nevoile de întreținere.
Cu ajutorul circuitelor de referință, al controllerelor DSP preprogramate pe bază de model și al unui mediu de dezvoltare a motoarelor, proiectanții și programatorii de aplicații pentru motoare BLDC pot scurta timpul de proiectare a circuitelor și se pot concentra mai mult pe dezvoltarea aplicațiilor.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.