Cum pot IMM-urile să utilizeze un metavers industrial pentru a explora și implementa rapid soluții robotizate
Contributed By DigiKey's North American Editors
2024-11-21
Roboții și roboții colaborativi (coboții) sunt la vârful tehnologiilor de automatizare a fabricilor. Gemenii digitali și realitatea virtuală (VR) sunt vârful de lance al instrumentelor de proiectare și dezvoltare. Combinate, acestea pot fi valorificate pentru a crea un metavers industrial care să asigure mai rapid o productivitate mai mare, chiar și pentru întreprinderile mici și mijlocii (IMM-uri).
Proiectanții din IMM-uri pot beneficia de o interfață simplă și intuitivă care combină un geamăn digital, un model virtual extrem de detaliat al unui obiect fizic, cum ar fi un robot delta, liniar sau cu mai multe axe, și un mediu VR tridimensional (3D) pentru a permite executarea și verificarea directă a secvențelor de mișcare ale robotului.
Utilizarea acestor caracteristici permite reglarea fină și optimizarea sistemului de automatizare chiar și fără hardware fizic și permite explorarea rapidă a mai multor posibilități de soluții.
Acest articol analizează mai întâi distincția dintre un geamăn digital matematic, descris de date, și un geamăn digital vizual (geamăn VR) și modul în care ambele sunt necesare pentru a crea metaversul industrial. Apoi, prezintă un sistem de control al roboților și software-ul aferent de la Igus, care poate fi utilizat pentru a simula un robot pe o interfață 3D (geamăn digital vizual) fără a utiliza hardware fizic, împreună cu roboți delta, liniari și multiaxiali compatibili care pot fi utilizați pentru a realiza soluția optimizată.
Gemenii digitali și VR sunt tehnologii complementare care utilizează diferite forme de vizualizare, interacțiuni și hardware. Gemenii digitali sunt modele bazate pe date ale obiectelor, sistemelor sau proceselor fizice. Aceștia sunt concepuți pentru a fi utilizați pe durata întregului ciclu de viață al elementului modelat, de la concepția inițială până la dezafectare și reciclare.
VR este o tehnologie imersivă, bazată pe imagini, care utilizează, de asemenea, modele digitale. Într-un mediu VR, este posibil să se simuleze relațiile și interacțiunile dintre obiecte, cum ar fi un robot care îndeplinește o sarcină. Astfel, în timp ce ambele tehnologii pot fi utilizate pentru proiectare și simulare, tehnologia geamănului digital se concentrează pe considerentele generale privind ciclul de viață, iar VR se concentrează pe interacțiunile dintre obiectele fizice.
Un metavers combină gemenii digitali și VR într-un mediu virtual special creat care sprijină interacțiunile în timp real dintre obiectele digitale și oameni. Acesta este adesea asociat cu jocurile video, dar se aplică din ce în ce mai mult și activităților comerciale și industriale.
Bine ați venit în iguverse
Igus a dezvoltat metaversul iguverse pentru a susține interacțiunile tehnice în medii industriale, cum ar fi dezvoltarea și implementarea sistemelor robotice. Iguverse poate fi implementat prin intermediul software-ului Igus Robot Control (iRC). Această aplicație gratuită și fără licență permite utilizatorilor să controleze diferite tipuri de roboți, inclusiv roboți delta, coboți (brațe robotice) și roboți portali.
Oferă utilizatorilor o interfață 3D și peste 100 de exemple de programe. Cerințele de sistem pentru implementarea iRC includ un PC (minim un procesor Intel i5) cu Windows 10 sau 11 (64 biți) cu 500 MB de spațiu liber pe disc și conectivitate de rețea Ethernet sau wireless.
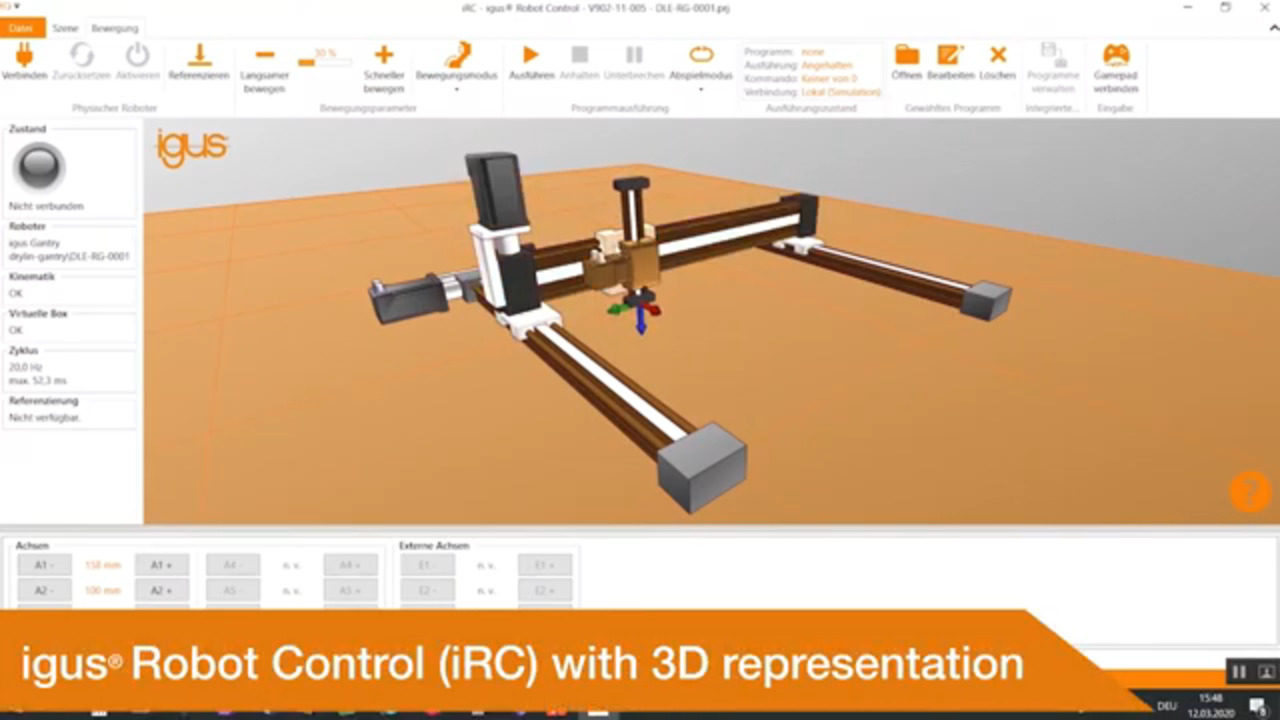
Nucleul software-ului este un geamăn digital 3D al robotului care este programat. Un exemplu în acest sens este un robot liniar cu trei axe, precum modelul DLE-RG-0001-AC-500-500-100, cu un spațiu de lucru de 500 x 500 x 100 mm sau un actuator xy cu două axe, precum modelul DLE-LG-0012-AC-800-500, cu un spațiu de lucru de 800 x 500 mm (Figura 1). Proiectanții pot defini mișcările cu câteva clicuri de mouse și pot utiliza modelul 3D pentru a se asigura că mișcările necesare sunt fezabile, chiar înainte de achiziționarea robotului.
 Figura 1: Exemplu de geamăn digital 3D VR al unui robot portal cu trei axe în iguverse. (Sursa imaginii: Igus)
Figura 1: Exemplu de geamăn digital 3D VR al unui robot portal cu trei axe în iguverse. (Sursa imaginii: Igus)
Pe lângă software-ul iRC, controlerul robotului este un element cheie în mediul de dezvoltare iguverse. De exemplu, modelul IRC-LG12-02000 este destinat motoarelor de 48 V, are șapte intrări și șapte ieșiri și are un cablu de 10 m pentru conectarea la robot. Controlerele IRC includ module de acționare a motoarelor pentru diferite dimensiuni de motoare pas cu pas bipolare și sunt disponibile ca dispozitive configurabile sau preconfigurate. De asemenea, are mai multe interfețe pentru integrarea sistemului, inclusiv:
- Interfață cu controler logic programabil (PLC) pentru control prin intermediul intrărilor și ieșirilor digitale, în special pentru pornirea și oprirea ușoară a programelor prin intermediul unui PLC sau al unui buton
- Interfață Modbus TCP pentru control prin intermediul unui PLC sau PC
- Interfață Common Robotic Interface (CRI) cu Ethernet pentru control și configurare utilizând un PLC sau PC
- Interfață Robot Operating System (ROS) pentru operarea robotului folosind ROS
- Interfață pentru camerele de detectare a obiectelor
- Interfață cloud pentru monitorizarea de la distanță a stării robotului
Cinematică susținută
În iguverse se acceptă o varietate de cinematici (mișcări de bază) care definesc mișcarea controlată a robotului. Pe lângă cinematica preconfigurată, în IRC pot fi configurate până la trei axe independente cinematic. Cinematica preconfigurată include:
- Roboți delta cu 2 axe și 3 axe
- Roboți portali,
- 2 axe (axele X și Y)
- 2 axe (axele Y și Z)
- 3 axe (axele X, Y și Z)
- Brațe robotice (coboți),
- 3 axe (axele 1, 2, 3)
- 3 axe (axele 2, 3, 4)
- 4 axe (axele 1, 2, 3, 4)
- 4 axe (axele 2, 3, 4, 5)
- 5 axe (de la axa 1 până la axa 5)
- 6 axe (de la axa 1 până la axa 6)
- Robot SCARA cu 4 axe
Programare ușoară pentru automatizare la costuri reduse
Roboții Igus și IRC sunt concepuți pentru a sprijini automatizarea la costuri reduse. Acest lucru nu ar fi posibil fără o interfață de programare ușor de utilizat. Un mouse cu 3 butoane sau un gamepad poate muta și poziționa un robot în iguverse. Cu software-ul IRC, utilizatorul poate deplasa liber toate axele geamănului digital în interfața 3D. O funcție de învățare susține dezvoltarea software-ului de control al robotului, chiar și fără a avea un robot fizic conectat.
Pentru a pune în aplicare învățarea, utilizatorul deplasează manual robotul virtual în poziția dorită și definește modul în care acesta se deplasează în locul respectiv. Procesul se repetă până la crearea profilului complet de mișcare. Centrul instrumentului din software-ul IRC permite utilizatorilor să adauge cu ușurință efectori finali potriviți, cum ar fi clești de prindere, iar punctul central al instrumentului se ajustează automat pe robot. În plus, se poate adăuga o conexiune la un sistem de control industrial de nivel superior.
Procesul începe prin activarea robotului folosind butoanele „connect” (conectare), „reset” (resetare) și „enable” (activare), în funcție de ce solicită interfața. Ledul de stare de pe IRC ar trebui să devină verde, iar starea ar trebui să indice „No error” (Nicio eroare). Profilul de mișcare poate fi introdus acum utilizând fila „Jogging” (Acționare prin impulsuri) (Figura 2).
 in the iguverse immersive development environment (click to enlarge)") Figura 2: fila „Jogging” (Acționare prin impulsuri) (stânga jos) din mediul de dezvoltare imersiv iguverse poate fi utilizată pentru a introduce profiluri de mișcare. (Sursa imaginii: Igus)
Figura 2: fila „Jogging” (Acționare prin impulsuri) (stânga jos) din mediul de dezvoltare imersiv iguverse poate fi utilizată pentru a introduce profiluri de mișcare. (Sursa imaginii: Igus)
Roboți portali
Roboții portali, precum cei incluși în exemplele anterioare din iguverse, constau din două axe X de bază, o axă Y și o axă Z opțională. Axa Y este atașată la cele două axe X paralele și se mișcă înainte și înapoi în spațiul bidimensional. Axa Z opțională susține o a treia dimensiune a mișcării.
Roboții portali de la Igus au garnituri din plastic autolubrifiante care alunecă și rulează mai lin și mai silențios decât modelele tradiționale bazate pe rulmenți cu bile. Noul design este mai ușor, rezistent la coroziune și nu necesită întreținere, acestea fiind calități importante pentru IMM-uri. De asemenea, esențial pentru IMM-uri, acești roboți costă cu până la 40 % mai puțin decât roboții portali tradiționali, oferind un randament mai rapid al investiției (ROI).
Acești roboți sunt potriviți pentru două clase de aplicații: viteze mici cu sarcini mari sau viteze mari cu sarcini mici. Printre aplicațiile reprezentative se numără operațiunile de ambalare, preluare și plasare, etichetare, manipulare a materialelor și asamblare.
Sunt disponibili într-o gamă largă de dimensiuni. Accesoriile disponibile includ cuplaje, efectori finali și flanșe de motor. Printre exemplele de roboți portali de dimensiuni medii se numără:
- DLE-FG-0006-AC-650-650 este un stativ plat bidimensional cu un spațiu de lucru de 650 x 650 mm. Acest robot poate manipula sarcini utile de până la 8 kg și are o rată dinamică de până la 20 de preluări pe minut.
- DLE-RG-0012-AC-800-800-500 este un stativ tridimensional cu un spațiu de lucru de 800 x 800 x 500 mm. Poate manipula sarcini utile de până la 10 kg cu o rată dinamică de până la 20 de ridicări pe minut.
Experiență în paletizare
Paletizarea produselor pentru expediere este o activitate zilnică în operațiunile de producție și logistică. Cel mai nou și mai mare membru al iguverse este robotul portal XXL cu un spațiu de lucru de 2 000 x 2 000 x 1 500 mm, potrivit pentru aplicații de paletizare de până la 10 kg. Sunt disponibile modele personalizate cu spații de lucru de până la 6 000 x 6 000 x 1 500 mm.
Acești roboți portali pot prelua piese care cântăresc până la 10 kg, le pot transporta la o viteză de până la 500 mm/s și le pot plasa pe un palet, cu o repetabilitate de 0,8 mm (Figura 3). Soluția robotului de paletizare Igus costă cu până la 60 % mai puțin decât sistemele comparabile.
 Figura 3: Paletizarea este o activitate obișnuită și importantă în operațiunile de producție și logistică și poate fi automatizată cu ajutorul unui robot portal. (Sursa imaginii: Igus)
Figura 3: Paletizarea este o activitate obișnuită și importantă în operațiunile de producție și logistică și poate fi automatizată cu ajutorul unui robot portal. (Sursa imaginii: Igus)
Roboți delta
La fel ca roboții portali, roboții delta sunt disponibili cu două sau trei axe. Roboții delta au un înveliș de lucru în formă de cupolă montat deasupra spațiului de lucru. Aceștia au viteze excepțional de mari și sunt adesea utilizați pentru manipularea materialelor și plasarea pieselor. Exemple de roboți delta de la Igus includ:
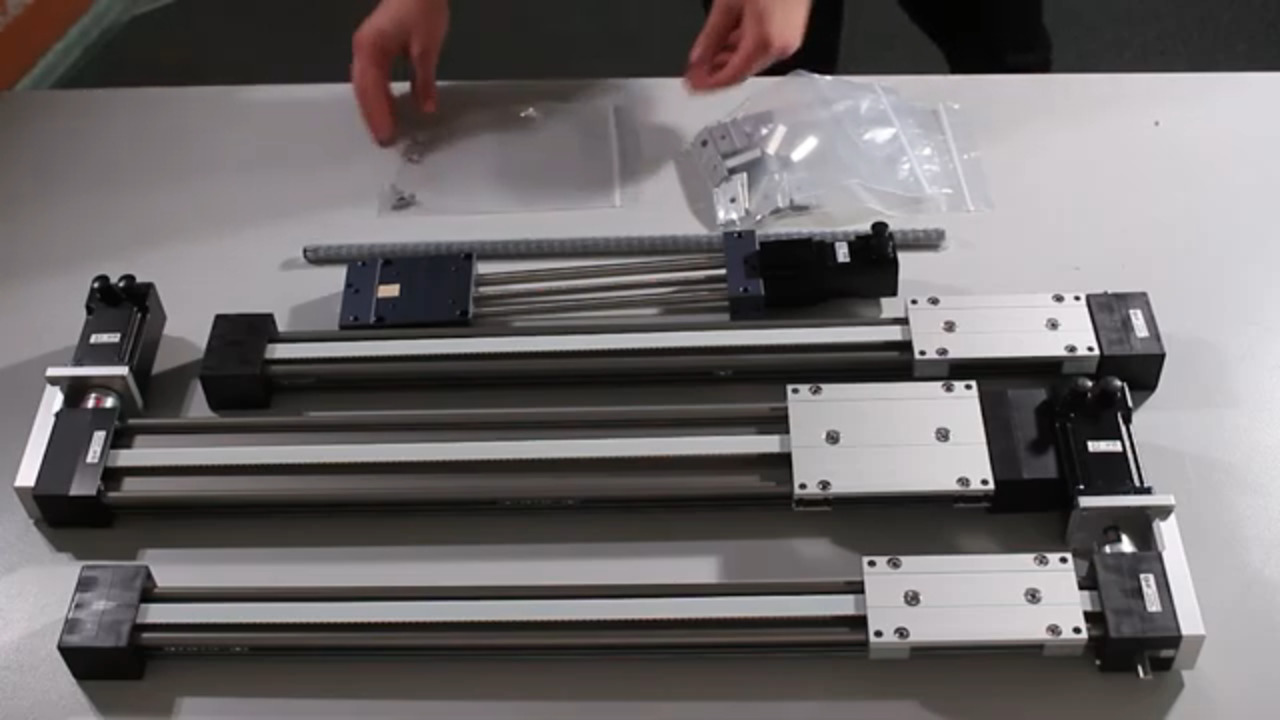
- RBTX-IGUS-0047 este un model cu trei axe cu un diametru al spațiului de lucru de 660 mm. Are o precizie de ± 0,5 mm, o sarcină utilă maximă de 5 kg, o viteză maximă de 0,7 m/s și poate efectua până la 30 de ridicări pe minut. (Figura 4).
- RBTX-IGUS-0059 este un model cu 2 axe cu un diametru al spațiului de lucru de 700 mm. De asemenea, are o precizie de ± 0,5 mm. Sarcina sa utilă maximă este de 5 kg, viteza maximă este de 2 m/s și poate efectua până la 50 de ridicări pe minut.
 Figura 4: Exemplu de robot delta cu trei axe lângă un iRC Igus (stânga). (Sursa imaginii: DigiKey)
Figura 4: Exemplu de robot delta cu trei axe lângă un iRC Igus (stânga). (Sursa imaginii: DigiKey)
Coboți cu brațe articulate
De asemenea, iguverse acceptă coboți cu brațe articulate. Coboții pot avea de la două la 10 sau mai multe axe, numite și grade de libertate (DOF). În general, aceștia au un spațiu de lucru mare și pot efectua sarcini complexe în colaborare cu o persoană. Modelul REBEL-6DOF-02 de la Igus are 6 DOF, iar modelul REBEL-4DOF-02 are 4 DOF. Ambele au o precizie de ± 1 mm, un domeniu de lucru nominal de 400 mm și pot efectua cel puțin 7 ridicări pe minut cu o viteză liniară de 200 mm/s.
Modelul cu 6 DOF are o sarcină utilă maximă de 2 kg și o rază de acționare maximă de 664 mm. Modelul cu 4 DOF are o sarcină utilă maximă de 3 kg și o rază de acționare maximă de 495 mm (Figura 5).
 and 6 DOF (right)") Figura 5: Coboți cu brațe articulate cu 4 DOF (stânga) și 6 DOF (dreapta). (Sursa imaginii: Igus)
Figura 5: Coboți cu brațe articulate cu 4 DOF (stânga) și 6 DOF (dreapta). (Sursa imaginii: Igus)
Rezumat
Metaversul industrial imersiv iguverse combină gemenii digitali și VR pentru a oferi instrumente care permit dezvoltarea și implementarea rapidă a soluțiilor robotizate. Este gratuit, fără licență și conceput pentru a rula local pe un PC, fără o conexiune la cloud. Poate fi utilizat pentru dezvoltarea și testarea soluțiilor robotice fără ca un robot să fie prezent.
Acceptă o gamă largă de cinematici în roboți delta, roboți portali, brațe robotice (coboți) și roboți SCARA. IRC include o serie de interfețe pentru a sprijini automatizarea și nevoile operaționale, inclusiv interfața PLC, Modbus TCP/IP, CRI Ethernet, interfața ROS, o interfață pentru camerele de detectare a obiectelor și o interfață Cloud. Iguverse, iRC și roboții corespunzători de la Igus au fost optimizați pentru a îndeplini cerințele de automatizare la costuri reduse ale IMM-urilor.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.